
MIRO’s brain model

Ben doing what he does best.
What does a model of a brain actually look like? The answer is that they come in many, many forms. For example, some scientific groups work at a very detailed level, trying to understand how individual neurons, or groups of neurons, work to perform the functions that form the building blocks of behaviour. These detailed models are intended to get at how neurons work, and are tested against the real-time electrical output from real neurons. Such a detailed model might be tested to see if it can correctly determine the time difference between two sensory events arriving at its inputs (these events might, for example, represent the arrival of a hand clap at each ear).
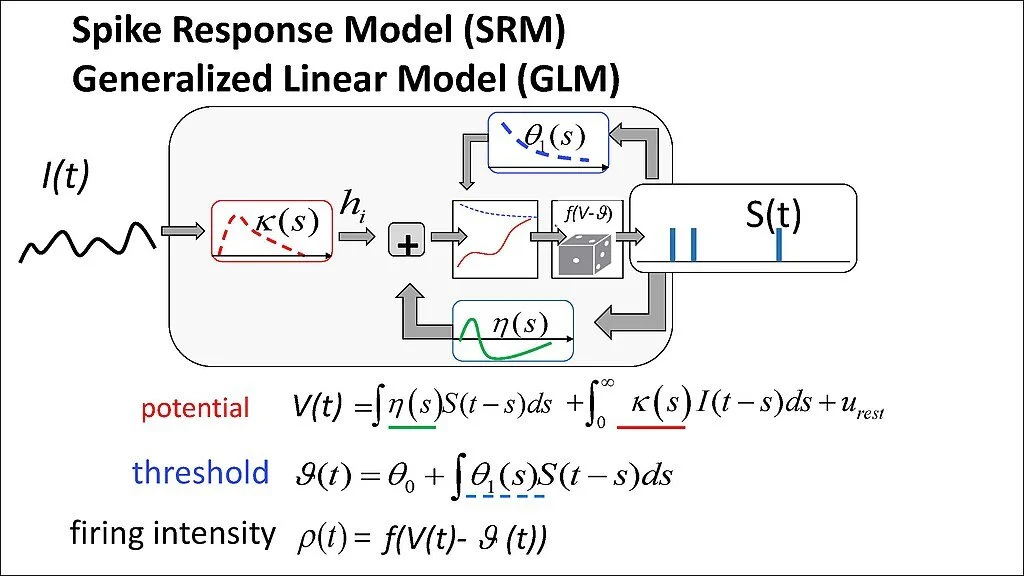
Models of a single neuron (brain cells) are already complex, and the brain comprises many billions of them. Larger scale brain models, therefore, cannot usually represent all of the individual neurons.
https://en.wikipedia.org/
Our models are built at a much larger scale, and are intended to get at how the system as a whole generates sensible behaviour. They are tested, accordingly, against the observed behaviour of animals in different situations. We might test, for example, if the model can navigate past an obstacle to reach a goal, or if it can integrate sensory data from its cameras (eyes) and microphones (ears) and correctly identify a human based on one data stream, or the other, or both.
MIRO’s control system - an example of a large scale model
Pictured below, it shows an interconnected network of pathways carrying signals all the way through the brain from ‘sensors’ through to ‘actuators’. Thus, when something is sensed by the robot (e.g. the approach of a person), its behaviour can reflect that (e.g. it may turn its head to look at them). The model forms a complete ‘control system’, processing data that comes from sensing the world (such as camera images) through to data that dictates how the robot will act on the world (such as wheel speed commands).

MIRO’s control system
For example, you can follow one pathway through in the diagram - we’ve marked it out with RED text. First, sensors measure the LIGHT level around MIRO; this level updates MIRO’s idea of what the TIME OF DAY is by adjusting the circadian clock. Next, MIRO’s AROUSAL is controlled to be high during daylight hours, and reduced at night-time. Finally, when arousal is low, MIRO expresses sleepiness by drooping of the EYELIDS. A pathway of this sort is present in the brains of most animals, including all of us, and is part of the mechanism that sends us off to sleep at the end of the day.
The Challenge
Ultimately, the power - and complexity - of this type of model comes from the simultaneous operation of many, perhaps rather simple, pathways such as this one. Each pathway working alone can be understood relatively easily; when many such pathways are operating together, and affecting one another, the system as a whole becomes much more difficult to analyse, understand, and model well. Such a system is known scientifically as a ‘complex system’ - this term refers exactly to that difficulty in making a good model of these systems. Remarkably, you don’t need many simultaneously-operating pathways before these systems start to become challenging.
The challenge, then, is to build an understanding of how those many pathways are working together to control behaviour whilst not losing track of the individual contributions made by each pathway and how it is being affected by the situation. Our observations of how these models operate as controllers for animal-like robots such as MiRo, tested against observations of real animals, forms a crucial anchor point that helps us to avoid becoming overwhelmed by all that complexity.