

Our Student Showcase blog series highlights some of the amazing student projects utilising MiRo. These articles are written by the students about their projects and this piece is written by Aung Htet from the University of Sheffield.
Introduction
My name is Aung Htet, and I am currently working on the MiRo to produce a simulation of a psychological experiment called the Strange Situation. It is a continuation of a group project I worked on while at the University of Sheffield. Being allowed to continue on this project along with my supervisor, Dr. Alejandro Jimenez-Rodriguez, I have been working on this project at Sheffield Robotics to be able to embody the simulation and write a paper related to it. The idea of the project is to be of use in affective and social robotics, where it will allow the MiRo to simulate behaviours rather than following a set of instructions that have been tasked for completion.
What the project is about
As an introduction to the project, it is based on a psychological experiment called the Strange Situation Procedure, which is based on the relationship between the caretaker and the child. The purpose of this experiment is to observe different attachment behaviours between the mother and child, which can be exhibited in different scenarios. The possible attachment styles can either be secure, ambivalent or avoidant.
Thus, in our experiment for simulating behaviour, we will be simulating these three types of behaviour by having the MiRo decide whether to explore or care for each other. The decision process will be made through a coupled oscillator dependent on the ambivalent level, avoidant level and the information inferred from one another. There are two parts to the project: first, to allow the MiRos to directly infer from each other, followed by the MiRos having the ability to take cues for inferring information.
Progress on what is being done or what will be done
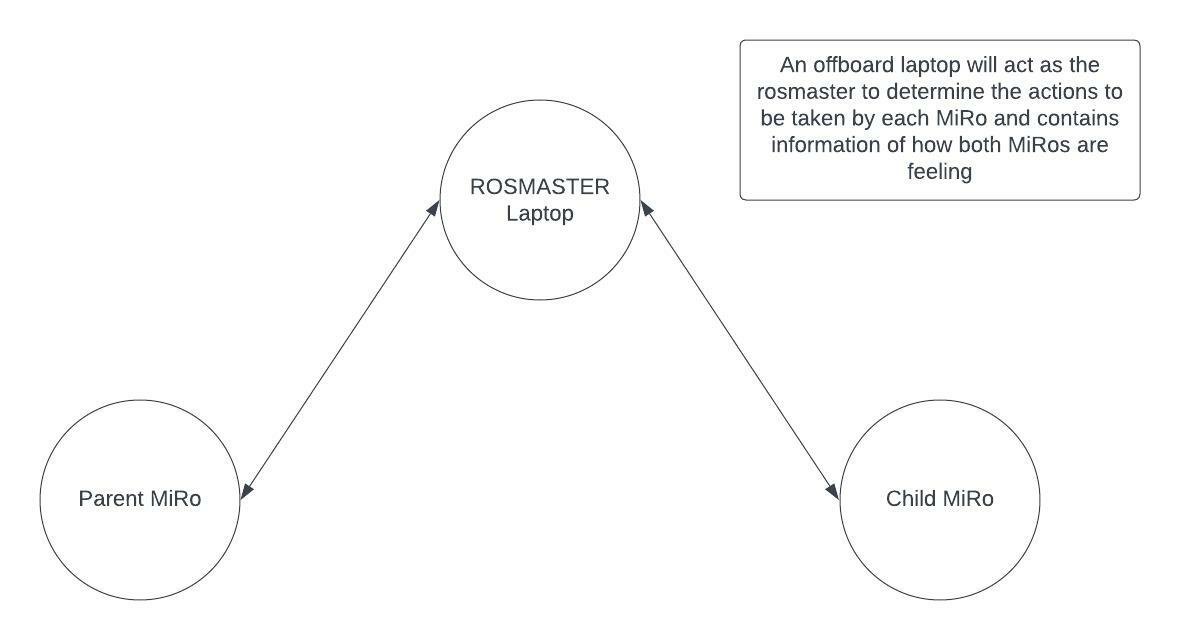
The first step of the project involves using a QR code to determine where the MiRos would meet, and sound recognition will be involved in determining whether care is being given or received. In this step, the parent and child share a common state that would be communicated to all the nodes. The step has been successful, with a demonstration being done at the Sheffield Robotics lab.
First stage of the project
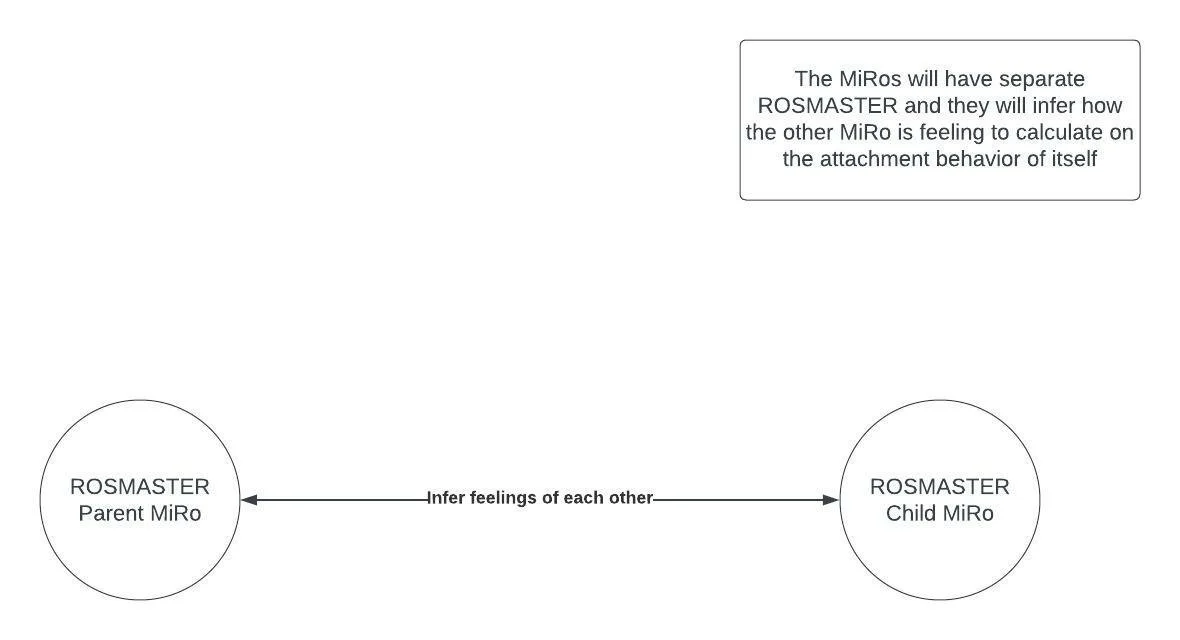
Second stage of the project
The second step of the project would involve the MiRo to determine each other's state through inference on cues like sounds and gestures.
Thus, further improvements will be made concerning the detection of audio through speech recognition and detecting the “coo” of another MiRo. This will be used on communications between the MiRos with current progress being done on speech recognition. Currently, the MiRo is focused on being able to detect a few commands, which set the MiRo to do some actions.
The MiRo will also be able to detect each other through image recognition rather than make use of a QR code to allow proper simulation of detecting the other MiRo and care being given. This will allow the MiRo to meet each other rather than setting a rendezvous point through the use of a QR code.

POST AUTHOR
Aung Htet
Computer Science Student at The University of Sheffield











