
Calibration Page
MiRo is calibrated at the factory, but you may need to use this page to recalibrate if you have performed some types of maintenance.
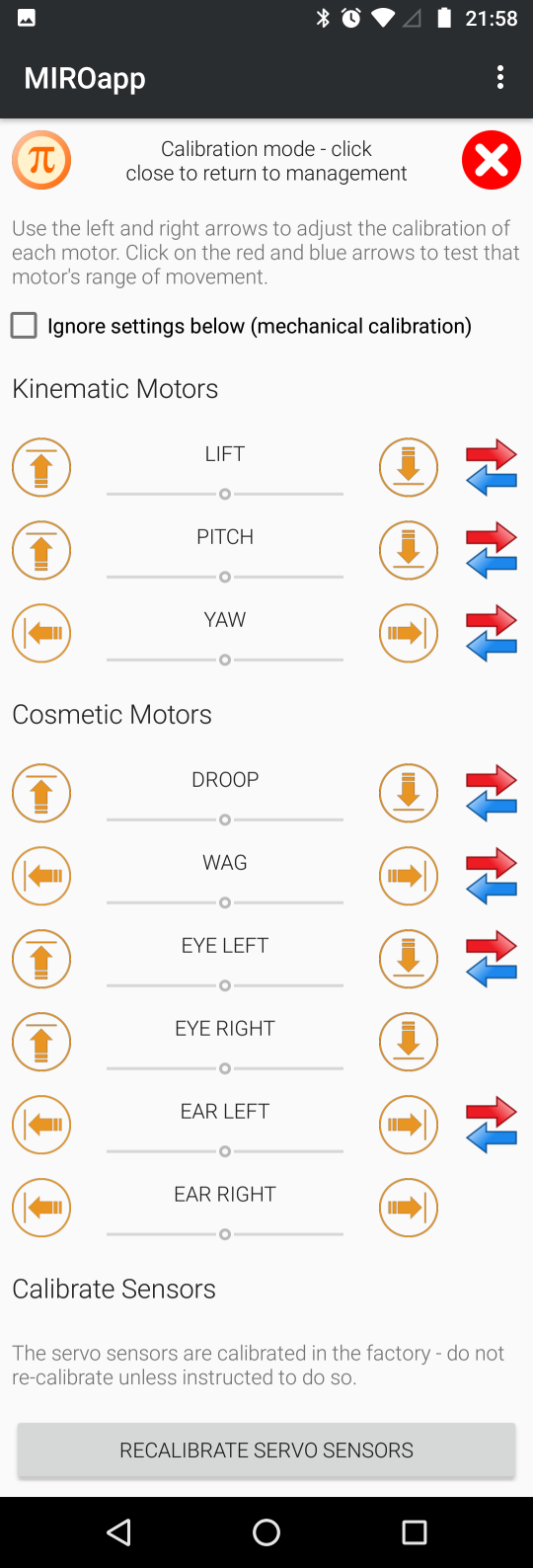
To return to the Management page, click the red exit symbol.
Calibrate motors
Mechanical calibration
Check the box to ignore the "soft" calibration settings which form the bulk of this page. Use this mode to confirm or adjust the mechanical calibration point of each degree of freedom.
Mechanical calibration will not be perfect owing to the discrete toothed adjustment—for fine adjustment, use soft calibration.
Soft calibration
Uncheck the box to use the "soft" calibration settings. This allows you to adjust the calibration of MiRo's servos a small amount in software, using the sections "Kinematic Motors" and "Cosmetic Motors". Press the left/right or up/down arrows to adjust the calibration point, or click the red/blue arrows to test that motor.
Soft calibration is not a substitute for mechanical calibration—if the mechanical calibration is too far out, it will be impossible to reach the calibration point with the soft adjustment.
Calibration points
The mechanical calibration point for each motor is listed below. Some calibration adjustments require the removal of the body shell to observe them. Adjust calibration until the mechanical statements below hold true.
LIFTThe neck lift servo horn points vertically.PITCHThe head is positioned with its midline at right angles to the neck lift member.YAWThe head is pointing directly forward.DROOPThe servo horn driving tail droop is horizontal.WAGThe tail is pointing directly rearward.EYEThe eyelid of each eye covers half of the camera lens.EARThe four edges of the two ear mouldings are all in the same plane.
Calibrate sensors
MiRo's servo sensors are calibrated at the factory; if you have serviced one of the servos, you will need to calibrate the new sensors by clicking the button here. Calibration is automatic, and you will receive a message which should indicate success on three degrees of freedom (LIFT, PITCH and YAW). If this does not happen, please contact support.